|
405 Documentation
9.0
|


|
|
405 Documentation
9.0
|
|
The goal of this lab is to develop a simulation and test a controller for the simplified model of the pivoting platform using the equations derived from Lab 05. The lab was completed in collaboration with Jacob Everest.
Jacob's BitBucket: https://mediocre-code.bitbucket.io/
(Source: https://bitbucket.org/dhmorse/me-405/src/master/Lab06/ see also https://bitbucket.org/mediocre-code/me-405-lab/src/master/Lab6/)

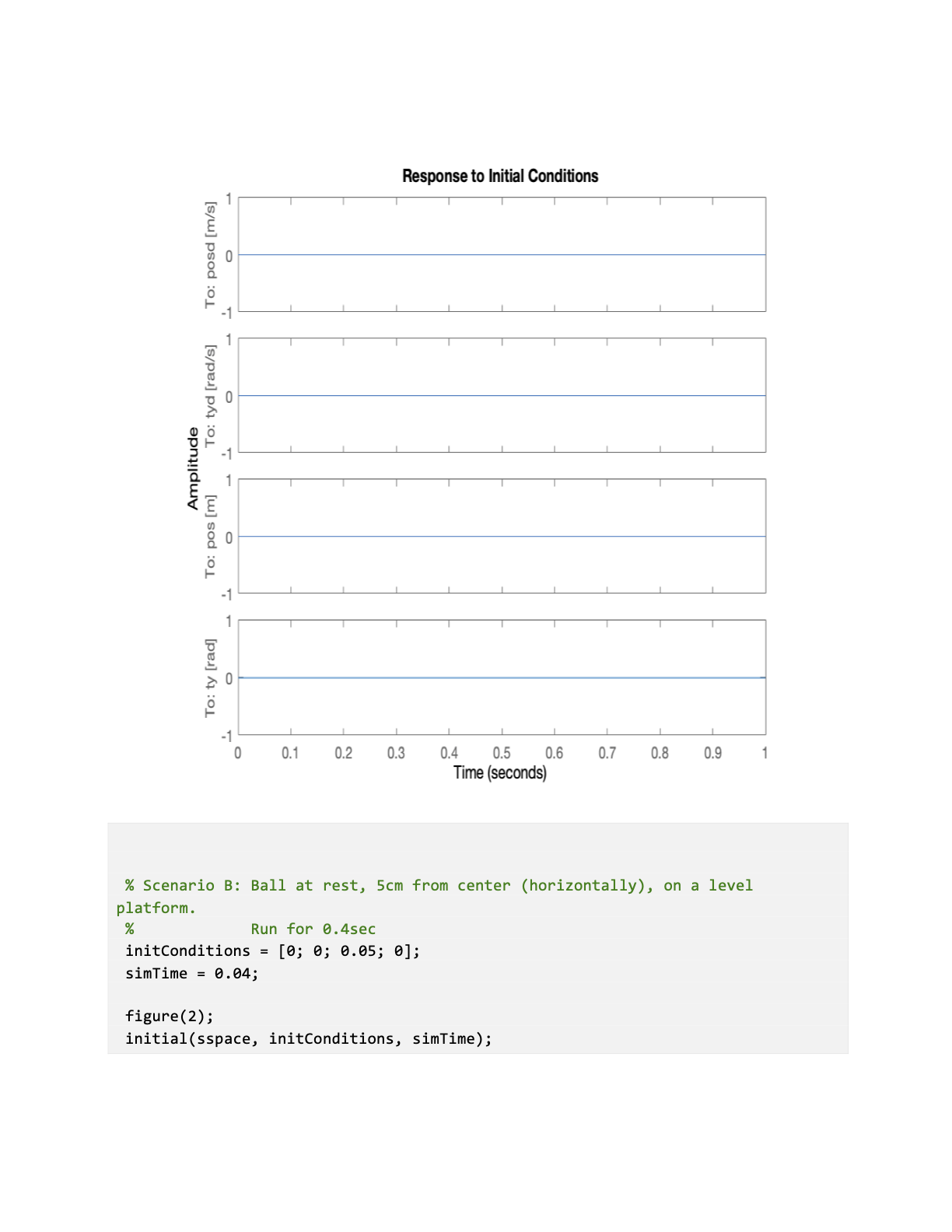
The ball is placed in the center of already balanced platform. In this scenario would not expect any movement to occur. Without any external stimulus the ball and platform remain unperturbed. The resulting graphs depicting postion, angle, linear velocity, and angular velocity therefore make sense because they indicated a constant, zero response with respect to time.

When the ball is placed 5cm off the center of a level platform, the response graphs indicate a dramatic change in the angle of the platform and positon of the ball. Unexpectidly, neither the velocity or angular velocity graphs are affected. This indicates an error in the model concerning dynamic behavior.
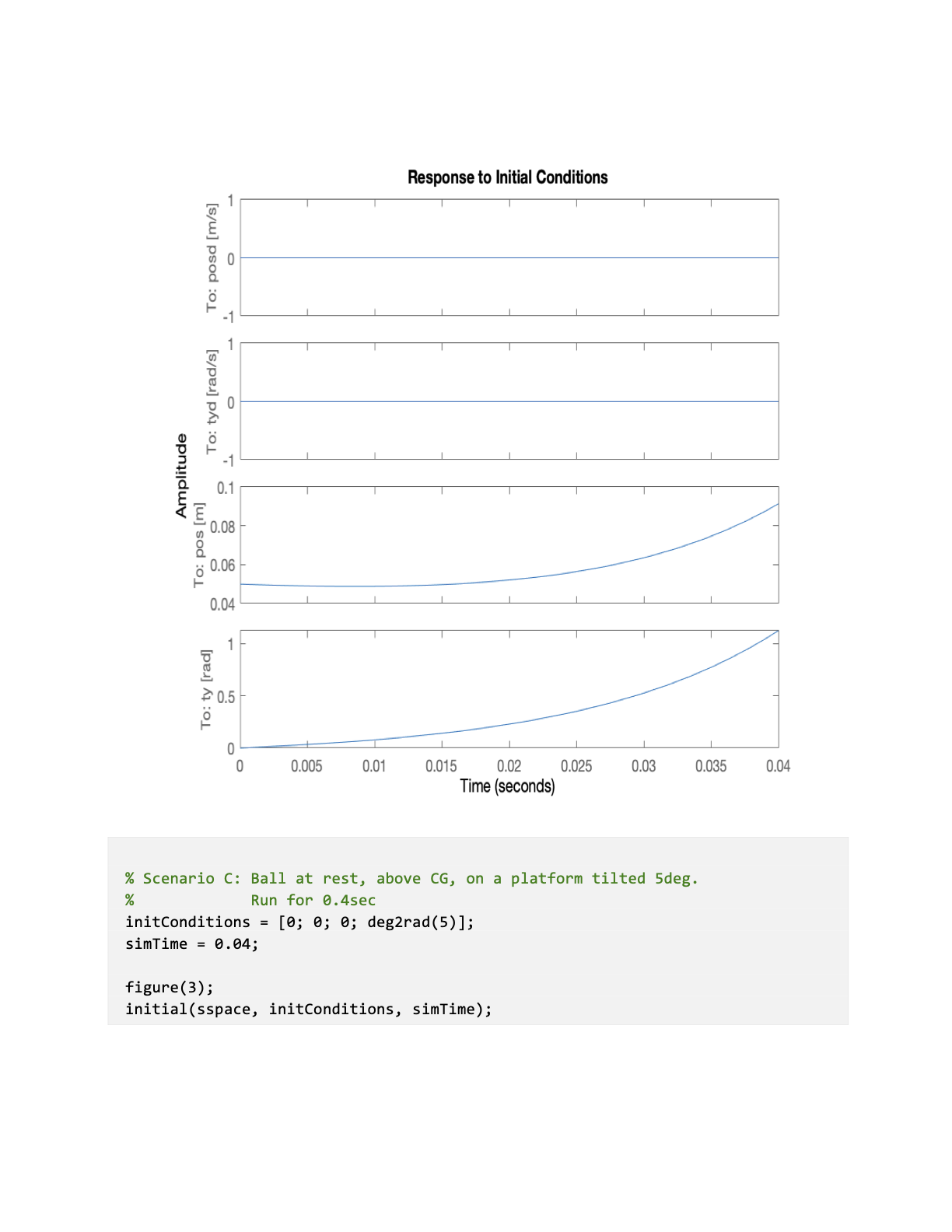
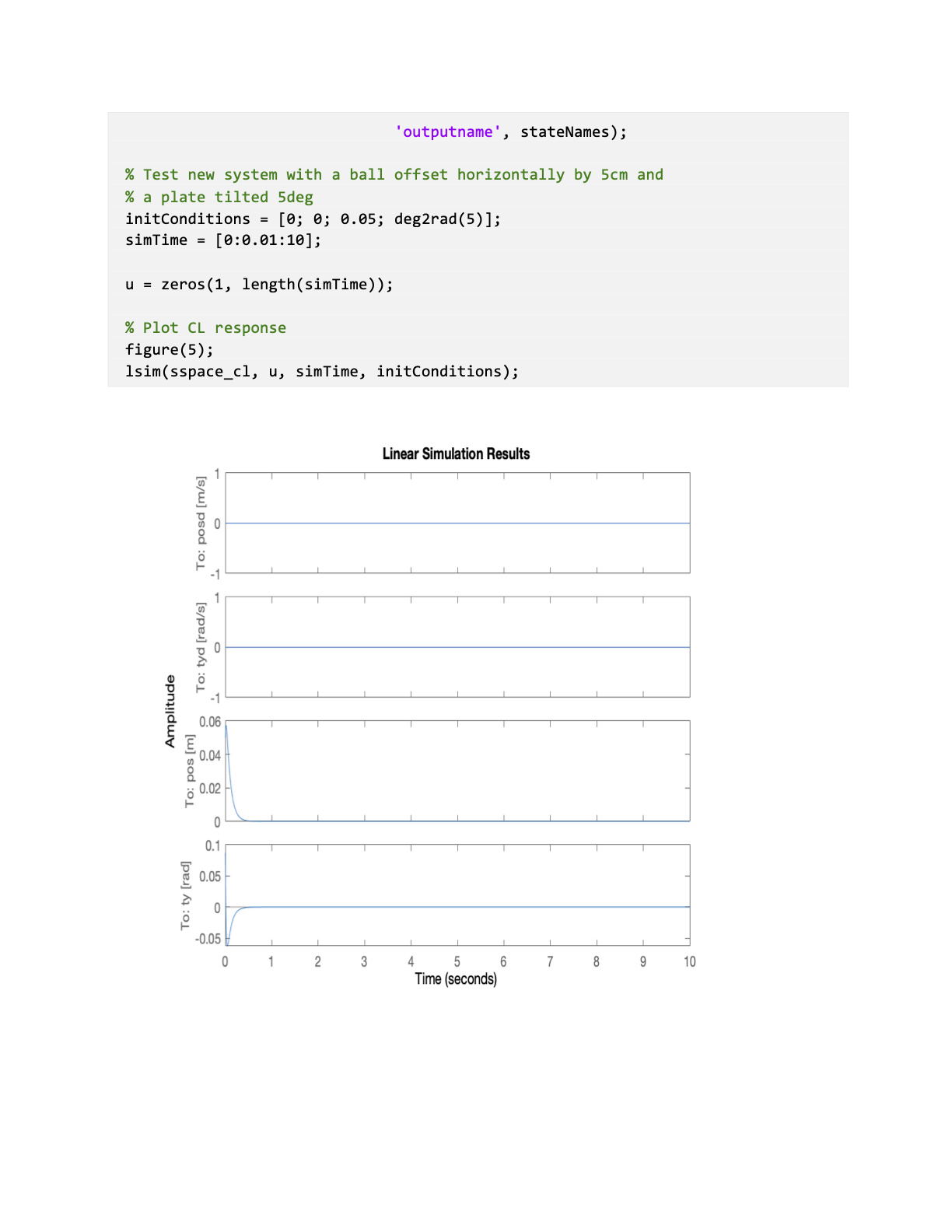
In this scenario the ball is placed above the center of gravity of the platform which lists at five degrees. The plots indicated a response similar to that of the last scenario. The lack of change in velocities is concerning. At thhis point Jacob and I decided to move forward with his results.

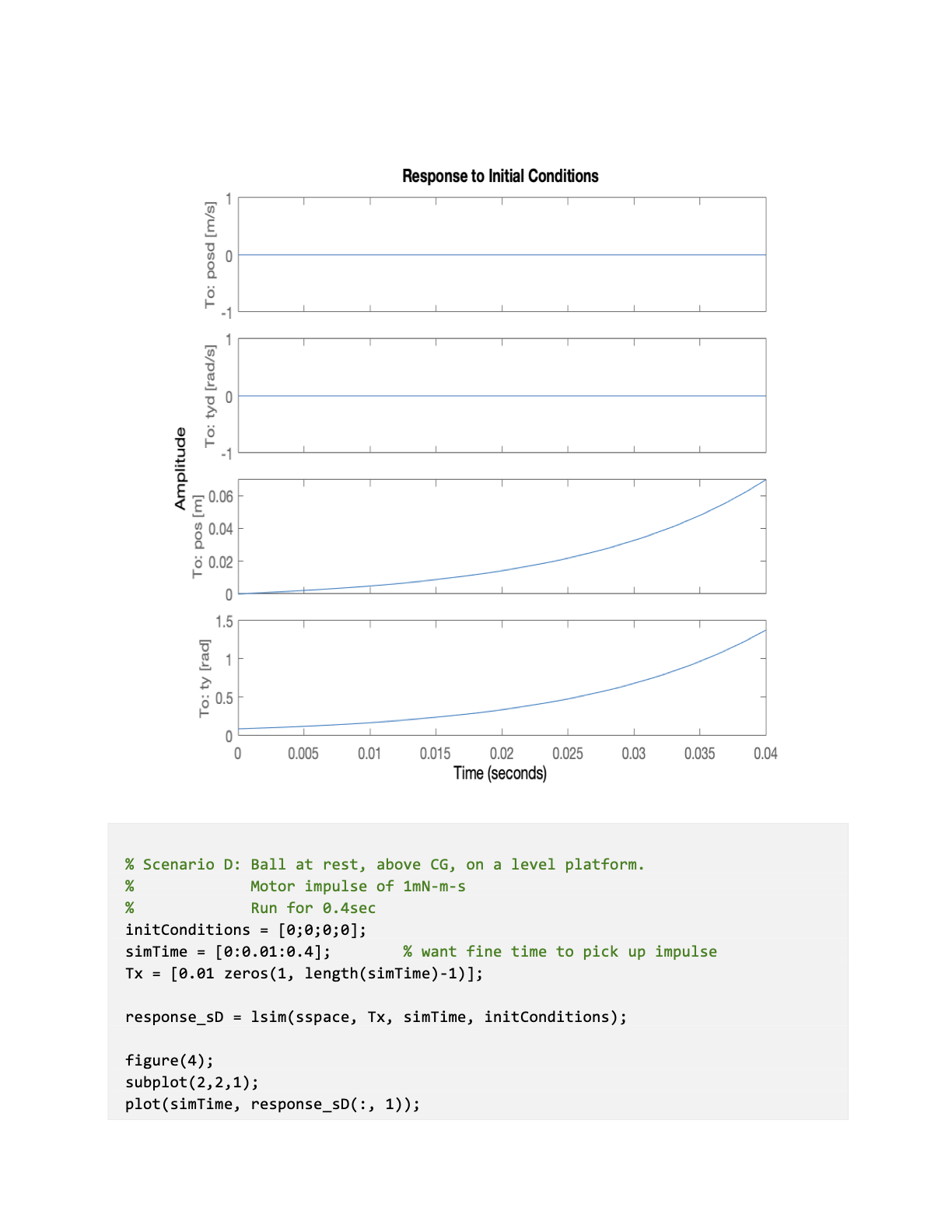
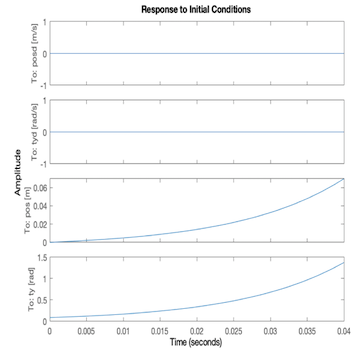
Here the ball is placed above the center of gravit once again. This time the platform is level, however, there is a motor pulse of 1mN-m-s. The plots once again show a change in angle and position, but not either velocity. It makes even less since in this scenario that the is no velocity because an impuls immediately accelerates the system.

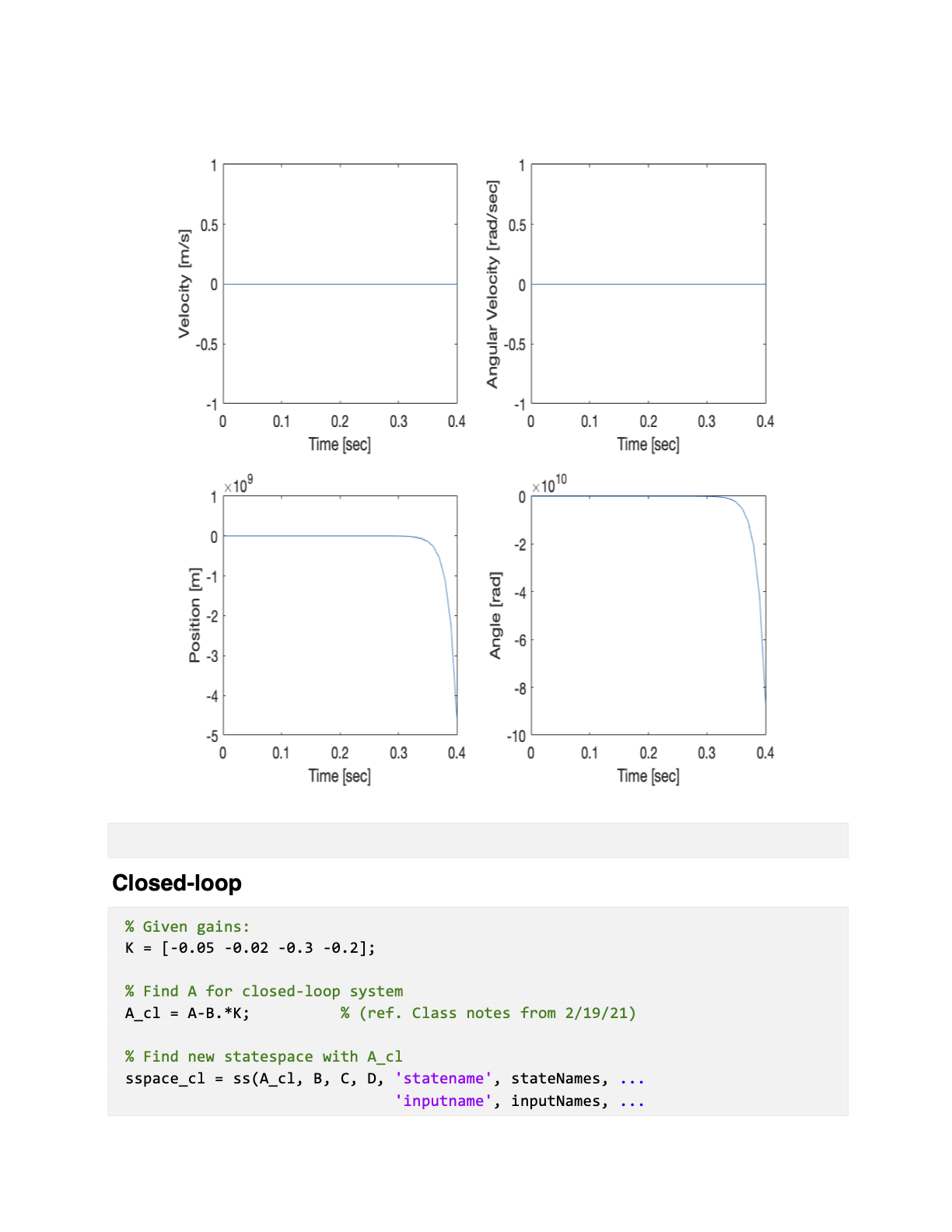
Based on the previous results I have no expectation for this being correct. In fact the graph does not indicate the expected hysteresis from a closed loop, untuned system.